Welcome to our project home page!
Here you will find information about our team. Use the tabs at the top of the screen to navigate through our documents, learn some more about our team members, and view our git lab repository. Below is a quick overview of our project, but for more details, take a look at our design document.
Project Description
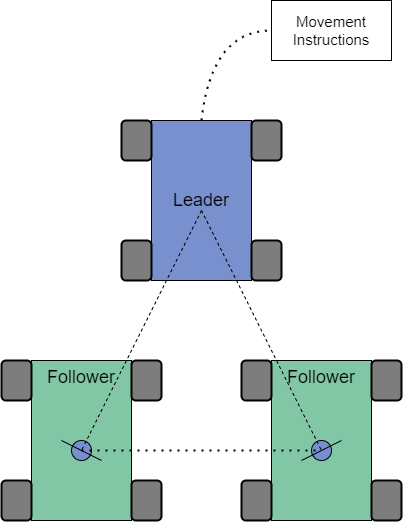
Our project is based on how birds fly in a swarm. The goal of the project is to design a system of robots that will show signs of swarm behavior. We will have one cybot act as the lead bird. The other two cybots will act as follower birds. The two followers will form an equilateral triangle between themselves and the lead bot.Fuctional Requirements
The main functional requirement for this project is the bird swam like behavior. We will design the leader robot to take commands from the user or follow some predetermined path. To start, this path will consist of the leader going in a straight line and then making a turn. After that has been completed, we will try more complicated paths, such as going in a circle or making multiple turns. Testing will be done in order to ensure that the robots are acting as expected. Once this has been completed we will try to make the robot do some sort of dance back and forth to a pop song. Also, each follower robot will need to maintain a certain distance with about a 10% margin of error. This distance will have to be maintained between the leader robot and the other follower robot. Each follower robot will not be able to communicate with the leader robot or with each other, they will only use sensors to gather data about its surroundings to determine where to go.Conceptual Sketch
Environmental Requirements
- The robots must operate in a closed and controlled environment, for example, this will be the inside one of the labs in Coover.
- The swarm should be able to operate with ambient indoor light and EM noise
- It should be given adequate floor space to conduct testing
- And each robot must be able to navigate the environment entirely independent of the other robots, meaning that there will not be an communication between robots
Economic Requirements
- $500 budget from ISU for purchasing of hardware such as sensors
- We expect each team member to put in 3-5 hours per week for 14 weeks, in total between 250 and 450 person hours to complete